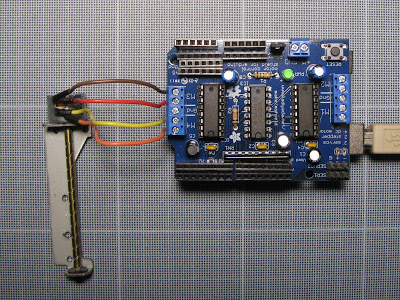
Contrôle d’un moteur pas à pas bipolaire via le motor shield Adafruit:
Test effectué sur le moteur actionnant la tête de lecture d’un lecteur cd-rom.
Utilisation du shield sans alimentation externe (power jumper connecté).
Librairie Arduino du motor shield
#include <afmotor .h="">
// Creation de la variable motor2.
// Fonction AF_Stepper(steps, stepper#);
// steps = nombre de pas
// stepper#: 1 (m1,m2), 2 (m3,m4).
AF_Stepper motor2(48, 2);
void setup() {
Serial.begin(9600);
Serial.println("Testing bi-polar motor on pin M3, M4 width 10 speed");
motor2.setSpeed(10); // 10 rpm
motor2.step(100, FORWARD, SINGLE);
motor2.release();
delay(1000);
}
// double stepper motor fonction
/*void doublestep (int steps, int direction, int style) {
while (steps--) {
motor1.step(1, direction, style);
motor2.step(1, direction, style);
}
}*/
void loop() {
Serial.println("Stepper single");
motor2.step(100, FORWARD, SINGLE);
motor2.step(100, BACKWARD, SINGLE);
Serial.println("Stepper double");
motor2.step(100, FORWARD, DOUBLE);
motor2.step(100, BACKWARD, DOUBLE);
Serial.println("Stepper interleave");
motor2.step(100, FORWARD, INTERLEAVE);
motor2.step(100, BACKWARD, INTERLEAVE);
Serial.println("Stepper microStep");
motor2.step(100, FORWARD, MICROSTEP);
motor2.step(100, BACKWARD, MICROSTEP);
}
Comments are closed.